
- Model:GX36(With encoder)
- 1, powerful, with stall capability
- 2, can be reversed, support speed,R395 mountable encoder
- 3, suitable for robots, automatic actuators and other applications
- 4, because of the three-tooth transmission mechanism, the planetary
- gear motor has the same size and greater strength
Detailed introduction
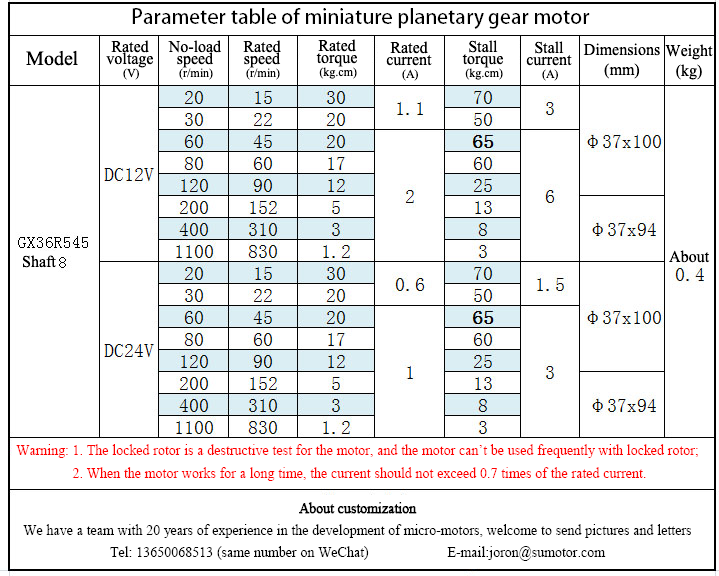
Technical Parameters
 Encoder description:
Encoder description:
GX36R395 can be equipped with an encoder, which is a high-performance two-channel incremental magnetic encoder, suitable for harsh environments. Each magnetic encoder contains a magnetic ring and a Hall detection circuit, and outputs two square waves. The high-speed shaft of the motor rotates 1 circle and outputs 13 pulses. The 1 pulse signal represents the rotation angle of the output shaft of the reducer = 360°÷13÷reduction ratio. The buyer can use this signal to add the control mechanism to detect the actual speed of the motor and the rotation of the output shaft. Angle.
GX36R395 can be equipped with an encoder, which is a high-performance two-channel incremental magnetic encoder, suitable for harsh environments. Each magnetic encoder contains a magnetic ring and a Hall detection circuit, and outputs two square waves. The high-speed shaft of the motor rotates 1 circle and outputs 13 pulses. The 1 pulse signal represents the rotation angle of the output shaft of the reducer = 360°÷13÷reduction ratio. The buyer can use this signal to add the control mechanism to detect the actual speed of the motor and the rotation of the output shaft. Angle.
Dimensions(unit: mm)
